Dynamics equation#
The dynamics of magnetisation field \(\mathbf{m}\), without external excitations (e.g. spin-polarised current) is governed by the Landau-Lifshitz-Gilbert (LLG) equation
where \(\gamma_{0} = \mu_{0}\gamma\) is the gyromagnetic ratio, \(\alpha\) is the Gilbert damping, and \(\mathbf{H}_\text{eff} = -\frac{1}{\mu_{0}M_\text{s}}\frac{\delta w(\mathbf{m})}{\delta \mathbf{m}}\) is the effective field. It consists of two terms: precession and damping. In this tutorial, we will explore some basic properties of this equation to understand how to define it in simulations.
Macrospin#
We will study the simplest “zero-dimensional” case - macrospin. In the first step, after we import necessary modules and create the mesh which consists of a single discretisation cell.
[1]:
import oommfc as mc
import discretisedfield as df
import micromagneticmodel as mm
# Define a macrospin mesh (i.e. one discretisation cell).
p1 = (0, 0, 0) # first point of the mesh domain (m)
p2 = (1e-9, 1e-9, 1e-9) # second point of the mesh domain (m)
n = (1, 1, 1) # discretisation cell size (m)
region = df.Region(p1=p1, p2=p2)
mesh = df.Mesh(region=region, n=n)
Now, we can create a micromagnetic system object.
[2]:
system = mm.System(name="macrospin")
Let us assume we have a simple Hamiltonian which consists of only Zeeman energy term
where \(M_\text{s}\) is the saturation magnetisation, \(\mu_{0}\) is the magnetic constant, and \(\mathbf{H}\) is the external magnetic field. We apply the external magnetic field with magnitude \(H = 2 \times 10^{6} \,\text{A}\,\text{m}^{-1}\) in the positive \(z\) direction.
[3]:
H = (0, 0, 2e6) # external magnetic field (A/m)
system.energy = mm.Zeeman(H=H)
Dynamics simulation#
In the next step we can define the system’s dynamics. Let us assume we have \(\gamma_{0} = 2.211 \times 10^{5} \,\text{m}\,\text{A}^{-1}\,\text{s}^{-1}\) and \(\alpha=0.1\).
[4]:
gamma0 = 2.211e5 # gyromagnetic ratio (m/As)
alpha = 0.1 # Gilbert damping
system.dynamics = mm.Precession(gamma0=gamma0) + mm.Damping(alpha=alpha)
To check what is our dynamics equation:
[5]:
system.dynamics
[5]:
Before we start running time evolution simulations, we need to initialise the magnetisation. In this case, our magnetisation is pointing in the positive \(x\) direction with \(M_\text{s} = 8 \times 10^{6} \,\text{A}\,\text{m}^{-1}\). The magnetisation is defined using Field class from the discretisedfield package we imported earlier.
[6]:
initial_m = (1, 0, 0) # vector in x direction
Ms = 8e6 # magnetisation saturation (A/m)
system.m = df.Field(mesh, nvdim=3, value=initial_m, norm=Ms)
Now, we can run the time evolution using TimeDriver for \(t=0.1 \,\text{ns}\) and save the magnetisation configuration in \(n=200\) steps.
[7]:
td = mc.TimeDriver()
td.drive(system, t=0.1e-9, n=200)
Running OOMMF (ExeOOMMFRunner)[2023/10/23 15:56]... (0.8 s)
Simulation results#
How different system parameters vary with time, we can inspect by showing the system’s datatable.
[8]:
system.table.data
[8]:
| E | E_calc_count | max_dm/dt | dE/dt | delta_E | E_zeeman | iteration | stage_iteration | stage | mx | my | mz | last_time_step | t | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | -4.400762e-22 | 37.0 | 25204.415522 | -8.798712e-10 | -3.269612e-22 | -4.400762e-22 | 6.0 | 6.0 | 0.0 | 0.975901 | 0.217115 | 0.021888 | 3.715017e-13 | 5.000000e-13 |
| 1 | -8.797309e-22 | 44.0 | 25186.311578 | -8.786077e-10 | -4.396547e-22 | -8.797309e-22 | 8.0 | 1.0 | 1.0 | 0.904810 | 0.423562 | 0.043754 | 5.000000e-13 | 1.000000e-12 |
| 2 | -1.318544e-21 | 51.0 | 25156.186455 | -8.765071e-10 | -4.388134e-22 | -1.318544e-21 | 10.0 | 1.0 | 2.0 | 0.790286 | 0.609218 | 0.065579 | 5.000000e-13 | 1.500000e-12 |
| 3 | -1.756100e-21 | 58.0 | 25114.112032 | -8.735776e-10 | -4.375555e-22 | -1.756100e-21 | 12.0 | 1.0 | 3.0 | 0.638055 | 0.765021 | 0.087341 | 5.000000e-13 | 2.000000e-12 |
| 4 | -2.191985e-21 | 65.0 | 25060.188355 | -8.698302e-10 | -4.358857e-22 | -2.191985e-21 | 14.0 | 1.0 | 4.0 | 0.455710 | 0.883427 | 0.109020 | 5.000000e-13 | 2.500000e-12 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 195 | -2.009865e-20 | 1402.0 | 690.438568 | -6.602614e-13 | -3.374608e-25 | -2.009865e-20 | 396.0 | 1.0 | 195.0 | 0.013011 | -0.024099 | 0.999625 | 5.000000e-13 | 9.800000e-11 |
| 196 | -2.009897e-20 | 1409.0 | 675.493807 | -6.319876e-13 | -3.230101e-25 | -2.009897e-20 | 398.0 | 1.0 | 196.0 | 0.017545 | -0.020251 | 0.999641 | 5.000000e-13 | 9.850000e-11 |
| 197 | -2.009928e-20 | 1416.0 | 660.872303 | -6.049242e-13 | -3.091780e-25 | -2.009928e-20 | 400.0 | 1.0 | 197.0 | 0.021059 | -0.015612 | 0.999656 | 5.000000e-13 | 9.900000e-11 |
| 198 | -2.009958e-20 | 1423.0 | 646.567078 | -5.790193e-13 | -2.959381e-25 | -2.009958e-20 | 402.0 | 1.0 | 198.0 | 0.023428 | -0.010435 | 0.999671 | 5.000000e-13 | 9.950000e-11 |
| 199 | -2.009986e-20 | 1430.0 | 632.571305 | -5.542233e-13 | -2.832649e-25 | -2.009986e-20 | 404.0 | 1.0 | 199.0 | 0.024591 | -0.004988 | 0.999685 | 5.000000e-13 | 1.000000e-10 |
200 rows × 14 columns
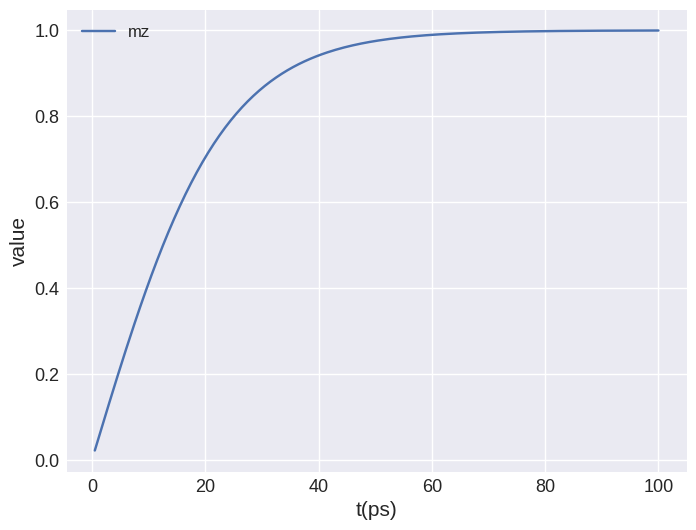
However, in our case it is much more informative if we plot the time evolution of magnetisation \(z\) component \(m_{z}(t)\).
[9]:
system.table.mpl(y=["mz"])
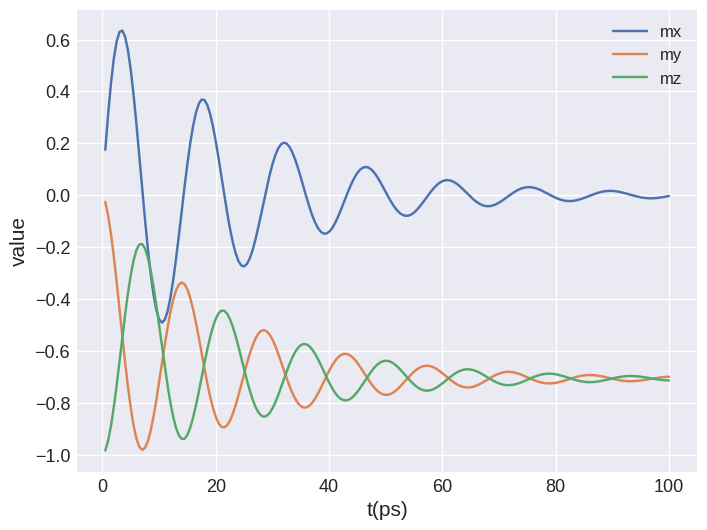
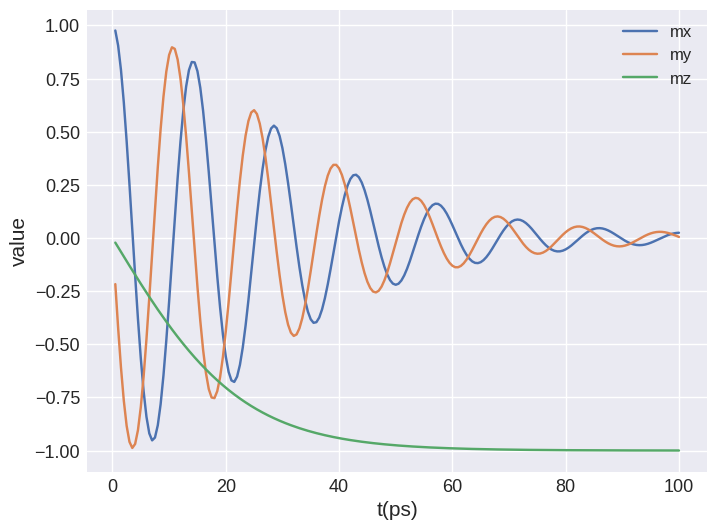
Similarly, we can plot all three magnetisation components
[10]:
system.table.mpl(y=["mx", "my", "mz"])
We can see that after some time the macrospin aligns parallel to the external magnetic field in the \(z\) direction. We can also have a look at the dynamics using an interactive plot.
Exercise 1#
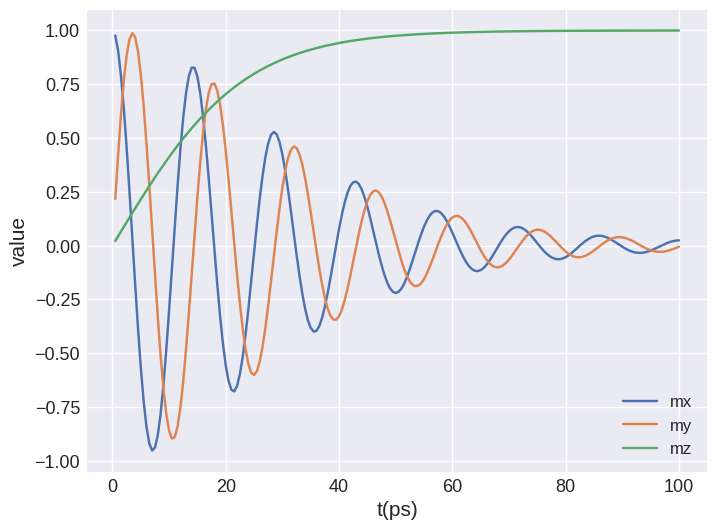
Modify Gilbert damping and set it to \(\alpha=0.005\) and see what happens with the dynamics.
Solution
[11]:
system.dynamics.damping.alpha = 0.005
system.m = df.Field(mesh, nvdim=3, value=initial_m, norm=Ms)
td.drive(system, t=0.1e-9, n=200)
system.table.mpl(y=["mx", "my", "mz"])
Running OOMMF (ExeOOMMFRunner)[2023/10/23 15:56]... (0.6 s)
Exercise 2#
Repeat the simulation with \(\alpha=0.1\) and \(\mathbf{H} = (0, 0, -2\times 10^{6})\,\text{A}\,\text{m}^{-1}\).
Solution
[12]:
system.energy.zeeman.H = (0, 0, -2e6)
system.dynamics.damping.alpha = 0.1
system.m = df.Field(mesh, nvdim=3, value=initial_m, norm=Ms)
td.drive(system, t=0.1e-9, n=200)
system.table.mpl(y=["mx", "my", "mz"])
Running OOMMF (ExeOOMMFRunner)[2023/10/23 15:56]... (0.6 s)
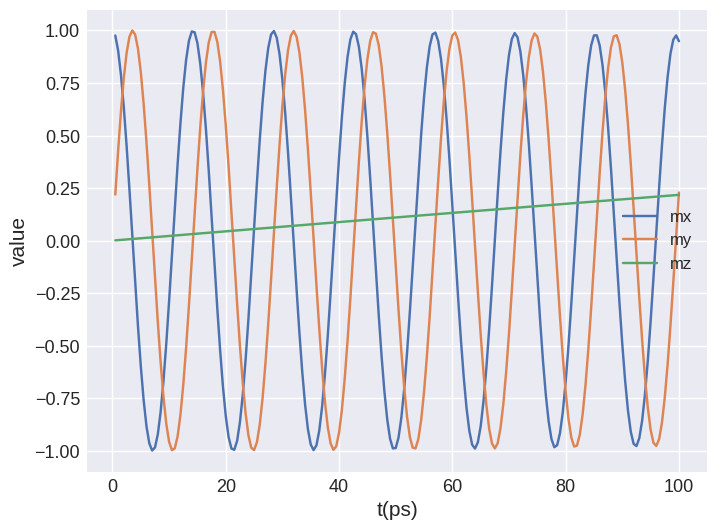
Exercise 3#
Keep using \(\alpha=0.1\). Change the field from H = (0, 0, -2e6) to H = (0, -1.41e6, -1.41e6), and plot \(m_x(t)\), \(m_y(t)\) and \(m_z(t)\) as above. Can you explain the (initially non-intuitive) output?
[13]:
system.energy.zeeman.H = (0, -1.41e6, -1.41e6)
td.drive(system, t=0.1e-9, n=200)
system.table.mpl(y=["mx", "my", "mz"])
Running OOMMF (ExeOOMMFRunner)[2023/10/23 15:56]... (0.7 s)